Creando tu Propio Coche Robot con Arduino: Una Guía Completa para el Chasis y Más Allá
Explorar el mundo de la robótica de forma práctica puede ser una experiencia increíblemente gratificante, especialmente cuando se trata de construir tu propio coche robot. Este artículo te guiará a través del proceso de construcción del chasis, la selección de componentes y la comprensión de las implicaciones de diferentes enfoques. Ya seas un principiante entusiasta o alguien con algo de experiencia, encontrarás información valiosa para tu proyecto.
Primeros Pasos: Elegir tu Kit de Inicio
Para aquellos que buscan una entrada rápida y guiada al mundo de la robótica, un kit de montaje Arduino paso a paso puede ser una excelente opción. Al explorar diferentes tutoriales y recursos sobre cómo hacer un robot, se hace evidente la popularidad de los kits de iniciación. Un ejemplo común es un robot con sensor ultrasónico Arduino. Estos kits a menudo vienen con una placa compatible con Arduino, como la ATmega-328, que permite la ejecución de una variedad de programas. Es importante notar que, si bien se promocionan como kits de iniciación Arduino, a menudo utilizan placas compatibles en lugar de la placa Arduino original. Esto no disminuye su utilidad para aprender, pero es una distinción a tener en cuenta.
Al adquirir un kit, es fundamental revisar su contenido. Un kit típico para un robot coche ultrasonidos puede incluir los siguientes "ingredientes":
- Una placa tipo Arduino compatible.
- Un módulo de ultrasonidos.
- Motores de engranajes.
- Una placa roja de control de motores.
- Una rueda loca.
- Una base de metacrilato opaco.
- Pilares de cobre.
- Ruedas neumáticas.
Aunque algunos kits se anuncian para mayores de 14 años, la edad es solo una guía, y la verdadera limitación es la paciencia y la curiosidad.
Armado paso a paso y tips del Chasis Carro Robot Arduino
El Montaje del Chasis: De los Componentes a la Estructura
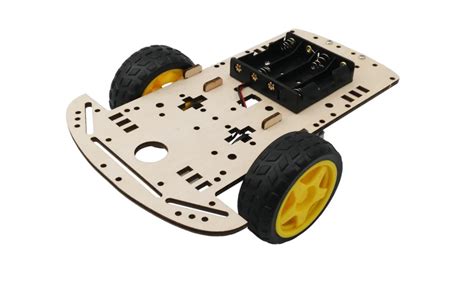
El proceso de ensamblaje de un chasis de robot coche generalmente sigue una serie de pasos lógicos y secuenciales. Aunque los kits pueden variar ligeramente, los principios fundamentales son los mismos.
Atornillar los Motores de Engranajes: El primer paso crucial es fijar los dos motores de engranajes a la base. Estos motores, que impulsarán las ruedas, se colocarán típicamente en los lados de la base. Cada motor tiene dos cables que deberán conectarse más tarde a la placa de control de motores.
Colocar la Rueda Loca: La rueda loca proporciona estabilidad y permite al robot girar. Se fija en la base, a menudo utilizando pilares de cobre cortos que se atornillan en agujeros designados.
Atornillar la Placa de Control de Motores: Esta placa, a menudo de color rojo, es esencial para gestionar la potencia y dirección de los motores. Se ubica en la base, generalmente por encima de donde se montan los motores y la rueda loca.
Encajar las Ruedas Neumáticas: Las ruedas principales se conectan a los ejes de los motores de engranajes. Estas ruedas suelen encajar perpendicularmente a los motores.
Montar el Servo y el Sensor Ultrasónico: Para robots con capacidades de detección de obstáculos, se monta un servo motor que albergará el sensor ultrasónico. Este conjunto se fija a la parte delantera y superior de la base. Algunos kits pueden incluir pilares adicionales para este montaje, mientras que otros pueden requerir soluciones alternativas como gomas elásticas.
Ensamblar las Placas de Metacrilato y Componentes Principales: Las placas de metacrilato, junto con pilares de cobre más largos, forman la estructura principal del robot. Encima de estas placas se montan la placa compatible con Arduino y el soporte para las pilas.
Es importante tener en cuenta que algunos kits pueden requerir herramientas adicionales no siempre incluidas, como un destornillador de precisión muy pequeño. La disponibilidad de instrucciones claras y completas también puede variar.
Entendiendo los Componentes Electrónicos Clave
La construcción de un coche robot Arduino implica la comprensión de varios componentes electrónicos esenciales.
Placas Tipo Arduino y Microcontroladores
La placa principal de control, a menudo una placa compatible con Arduino como la Duemilanove o una ATmega-328, actúa como el "cerebro" del robot. Estas placas ejecutan el código programado para controlar los motores, leer sensores y tomar decisiones.
- Placas Compatibles vs. Originales: Si bien una placa "compatible con Arduino" puede ofrecer una funcionalidad similar, es importante comprender que no es una placa Arduino original. Sin embargo, para muchos proyectos de iniciación, la diferencia es mínima.
- Microcontroladores vs. Microordenadores: En el ámbito de la robótica, a menudo se compara el uso de microcontroladores como el ATmega-328 (presente en placas Arduino) con microordenadores como la Raspberry Pi.
- Microcontroladores (ATmega-328): Son más simples, arrancan casi instantáneamente (alrededor de un segundo) y mantienen su programa cargado sin necesidad de un sistema operativo. Son ideales para tareas de control en tiempo real y son menos exigentes en cuanto a energía. La tensión de entrada puede variar típicamente entre 5 y 9 voltios.
- Microordenadores (Raspberry Pi): Ofrecen una mayor potencia de cálculo y son más versátiles, especialmente para el control remoto a través de Wi-Fi y Bluetooth, y para la transmisión de vídeo desde cámaras. La programación se realiza comúnmente en Python. Sin embargo, su inicio es más lento (aproximadamente un minuto) y requieren una fuente de alimentación de 5V estable y a menudo más potente.
Controladores de Motores
Los microcontroladores, por sí solos, no pueden suministrar suficiente corriente para alimentar motores eléctricos. Aquí es donde entran en juego los controladores de motores.
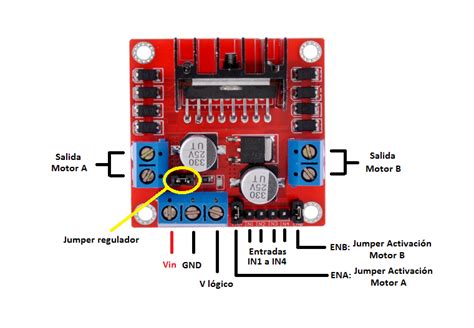
- La Placa L298N: Este es un controlador de motor muy común en kits de robótica. Permite controlar la dirección y la velocidad de dos motores de corriente continua de forma independiente.
- Funcionamiento Básico: El L298N utiliza un circuito H para invertir la polaridad de los motores, lo que permite cambiar su sentido de giro. La modulación por ancho de pulsos (PWM) se utiliza para controlar la velocidad, mediante la rápida conexión y desconexión de la tensión.
- Conexiones: El CI (Circuito Integrado) se alimenta de tensión en las conexiones VCC1 y Masa. La alimentación para los motores se realiza a través de VCC2 y Masa, donde se conectan las pilas o baterías externas (por ejemplo, de 6 o 9 voltios).
- Pines de Control: Los pines IN1 e IN2 son responsables del giro del motor (adelante/atrás). Los pines ENA (Enable A) controlan la velocidad del motor A mediante PWM.
- Motor Shields: Existen placas especializadas, llamadas "Motor Shields", que se conectan directamente a la placa Arduino y proporcionan interfaces para controlar motores. El "Motor Shield V1" utiliza un registro de desplazamiento para gestionar los pines de control, mientras que el "Motor Shield V2" utiliza el bus I2C para una conexión más eficiente y puede controlar hasta cuatro motores. Estos shields a menudo tienen conectores adicionales para módulos Bluetooth o de radiofrecuencia, así como para sensores.
Sensores
Los sensores permiten al robot percibir su entorno.
- Sensor Ultrasónico (HC-SR04): Este sensor emite ondas ultrasónicas y mide el tiempo que tardan en rebotar en un objeto. Esto permite calcular la distancia al obstáculo, fundamental para la navegación autónoma y la detección de colisiones. Se compone de un transmisor y un receptor.
- Encoders: Los encoders son dispositivos que se acoplan a los ejes de los motores y proporcionan información sobre la velocidad y la posición de las ruedas. Son prácticamente imprescindibles si se busca un control preciso del movimiento y la navegación del robot.
Módulos de Comunicación
Para controlar el robot de forma remota, se utilizan módulos de comunicación.
- Módulo Bluetooth (HC-05/HC-06): Permite la comunicación inalámbrica con un smartphone o una computadora a través de una aplicación. La aplicación "Arduino Bluetooth Controller" es una opción popular para controlar el robot mediante flechas en la pantalla.
- Transceptores de Radiofrecuencia (433 MHz, 2.4 GHz): Ofrecen alternativas para el control remoto, a menudo con mayor alcance o diferentes características.
Programación: Dando Vida a tu Robot
La programación es la etapa donde el código se carga en la placa compatible con Arduino para dictar el comportamiento del robot.
Conceptos de Programación
Control de Motores: El código debe gestionar las señales enviadas a los pines de control del L298N (o controlador similar) para mover el robot hacia adelante, atrás, girar o detenerse.
- Prueba de Movimientos: Es vital probar cada función de movimiento individualmente. Si el movimiento no es el esperado, se puede corregir invirtiendo los cables del motor o modificando la sección correspondiente del código.
- Control de Giro (IN1, IN2): Estos pines determinan la dirección de rotación del motor.
- Control de Velocidad (PWM en ENA): El uso de PWM permite variar la velocidad de los motores.
Configuración de Aplicaciones de Control Remoto: Para el control a través de Bluetooth, se configura una aplicación en un smartphone. Esto implica emparejar el dispositivo Bluetooth y configurar las flechas de la interfaz para que correspondan a las funciones de movimiento deseadas en el código del robot.
Función
loop(): En el entorno de programación de Arduino, la funciónloop()se ejecuta repetidamente después de la configuración inicial. Aquí es donde se implementa la lógica principal para leer sensores, procesar datos y enviar comandos a los actuadores (motores).
Estructura de Código para Movimiento Básico
Un ejemplo simplificado de cómo se podría estructurar el código para controlar un motor con el L298N podría implicar:
// Definición de pines para un motorint motorA_IN1 = 7;int motorA_IN2 = 8;int motorA_ENA = 9; // Pin PWM para velocidadvoid setup() { pinMode(motorA_IN1, OUTPUT); pinMode(motorA_IN2, OUTPUT); pinMode(motorA_ENA, OUTPUT); // Inicializar motores en estado de parada digitalWrite(motorA_IN1, LOW); digitalWrite(motorA_IN2, LOW); analogWrite(motorA_ENA, 0); // Velocidad 0}void loop() { // Ejemplo: Mover hacia adelante a media velocidad moverAdelante(128); // 128 es la mitad de 255 (máxima velocidad) delay(1000); // Mover por 1 segundo // Ejemplo: Detener el motor detenerMotor(); delay(1000); // Esperar 1 segundo // Ejemplo: Mover hacia atrás a velocidad máxima moverAtras(255); delay(1000); detenerMotor(); delay(2000);}void moverAdelante(int velocidad) { digitalWrite(motorA_IN1, HIGH); digitalWrite(motorA_IN2, LOW); analogWrite(motorA_ENA, velocidad);}void moverAtras(int velocidad) { digitalWrite(motorA_IN1, LOW); digitalWrite(motorA_IN2, HIGH); analogWrite(motorA_ENA, velocidad);}void detenerMotor() { digitalWrite(motorA_IN1, LOW); digitalWrite(motorA_IN2, LOW); analogWrite(motorA_ENA, 0);}Este es un ejemplo muy básico. Un programa completo para un coche robot autónomo implicaría leer datos de sensores, implementar lógica de decisión y controlar múltiples motores.
Consideraciones sobre el Chasis y el Diseño del Robot
La elección del chasis y la configuración general del robot tienen implicaciones significativas en su rendimiento y coste.
Coches Robot de Dos Ruedas vs. Cuatro Ruedas
Coches Robot de Dos Ruedas:
- Ventajas: Generalmente más económicos debido a la necesidad de menos motores y ruedas. Ofrecen una gran maniobrabilidad, permitiendo giros cerrados ("hacer girar el plato").
- Desventajas: Requieren una o dos ruedas de apoyo. La precisión en la marcha en línea recta puede ser menor, especialmente con motores de corriente continua de bajo coste que pueden no funcionar de manera perfectamente suave. La estabilidad direccional puede ser menor, y los giros requieren radios significativamente mayores en comparación con un diseño de cuatro ruedas más estable.
Coches Robot de Cuatro Ruedas:
- Ventajas: Mayor estabilidad direccional y mejor tracción. La marcha en línea recta tiende a ser más precisa.
- Desventajas: Mayor coste inicial debido a la necesidad de dos motores y ruedas adicionales. La maniobrabilidad puede ser algo menor en comparación con un diseño de dos ruedas con ruedas omnidireccionales o giratorias.
El Papel de los Motores Eléctricos
Los motores eléctricos son un componente común en la mayoría de los coches robot. Si bien son esenciales para el movimiento, su calidad y tipo pueden afectar el rendimiento. Los motores de corriente continua (DC) son los más comunes en kits de iniciación. La precisión y suavidad de su funcionamiento son factores a considerar, especialmente para aplicaciones que requieren un movimiento muy controlado.
Kits Económicos: Ventajas y Desventajas
Los kits económicos pueden ser una excelente puerta de entrada a la robótica, pero es importante ser consciente de sus limitaciones.
Ventajas:
- Accesibilidad: Reducen la barrera de entrada financiera para experimentar con la robótica.
- Aprendizaje Rápido: Permiten un montaje y puesta en marcha relativamente rápidos, proporcionando una gratificación inmediata.
- Base para la Experimentación: Sirven como una plataforma sólida para aprender los fundamentos y luego añadir o modificar componentes.
Desventajas:
- Calidad de Componentes: Los componentes pueden ser de menor calidad, lo que puede afectar la durabilidad y el rendimiento a largo plazo.
- Instrucciones Incompletas: Las instrucciones a veces pueden ser vagas o incompletas, requiriendo investigación adicional.
- Herramientas No Incluidas: Puede ser necesario adquirir herramientas adicionales (destornilladores de precisión, soldadores, etc.) que no se mencionan explícitamente.
- Precio: A pesar de ser "económicos", el coste total puede acumularse, y algunos kits pueden tener un precio elevado para lo que ofrecen. El precio de 99 euros IVA incluido mencionado en una experiencia particular indica que no todos los kits "de iniciación" son necesariamente baratos.
Ampliando las Capacidades: Sensores y Control Avanzado
Una vez que el chasis está construido y los motores funcionan, el siguiente paso es dotar al robot de inteligencia y capacidad de interacción.
Detección de Entorno
- Sensores de Distancia: Además del sensor ultrasónico frontal, se pueden añadir sensores de distancia infrarrojos o láser. La configuración puede variar, desde un único sensor montado en un servo para escanear el entorno, hasta múltiples sensores distribuidos estratégicamente.
- Detectores de Líneas: Para robots seguidores de líneas, se utilizan sensores infrarrojos que detectan la diferencia de reflectividad entre una línea oscura y el suelo. Se pueden usar varios sensores para una detección más precisa o una barra de detección con múltiples sensores.
Control y Comunicación Avanzada
- Servos Motores: Un servo motor puede ser utilizado para mover el sensor ultrasónico o una cámara, permitiendo al robot "mirar" en diferentes direcciones.
- Módulos de Comunicación Adicionales: Además del Bluetooth, se pueden integrar módulos de Wi-Fi para control remoto a través de internet o módulos de radiofrecuencia de 433 MHz o 2.4 GHz para un control más robusto.
Personalización y Experimentación
La robótica es un campo donde la experimentación es clave. Las configuraciones de chasis, procesador, controlador de motores y sensores pueden variar enormemente.
- Flexibilidad de Componentes: La elección de un chasis de metacrilato, plástico, madera o metal ofrece diferentes posibilidades de montaje. La base puede ser adaptada para alojar diferentes configuraciones de componentes.
- Modificaciones Sencillas: Añadir más sensores de distancia, servos, o sistemas de detección de líneas es generalmente sencillo y no requiere modificaciones estructurales complejas.
- Reciclaje y Creatividad: Utilizar materiales reciclados, pegamento, cinta de doble cara y piezas de plástico puede ayudar a crear configuraciones únicas y personalizadas. La clave está en la inventiva y en asegurar que los componentes estén bien fijados y alineados.
El Futuro de tu Coche Robot
La serie de blogs sobre la construcción de coches robot a menudo concluye con aspectos de la conducción autónoma, centrándose en la detección de obstáculos y la navegación. La combinación de sensores, lógica de programación y un chasis robusto abre un mundo de posibilidades para crear robots cada vez más sofisticados. Desde un simple coche teledirigido hasta un robot capaz de navegar por entornos complejos, el viaje comienza con la construcción del chasis y la comprensión de los componentes fundamentales.
El código fuente de muchos de estos proyectos suele estar disponible para su descarga en plataformas como Github, lo que facilita a los entusiastas replicar, modificar y aprender de proyectos existentes.
tags: #como #hacer #chasis #coche #arduino